
Optimizing Autonomous Decision-Making in Robots through Meta-Learning Algorithms
Article Sidebar
Main Article Content
Abstract
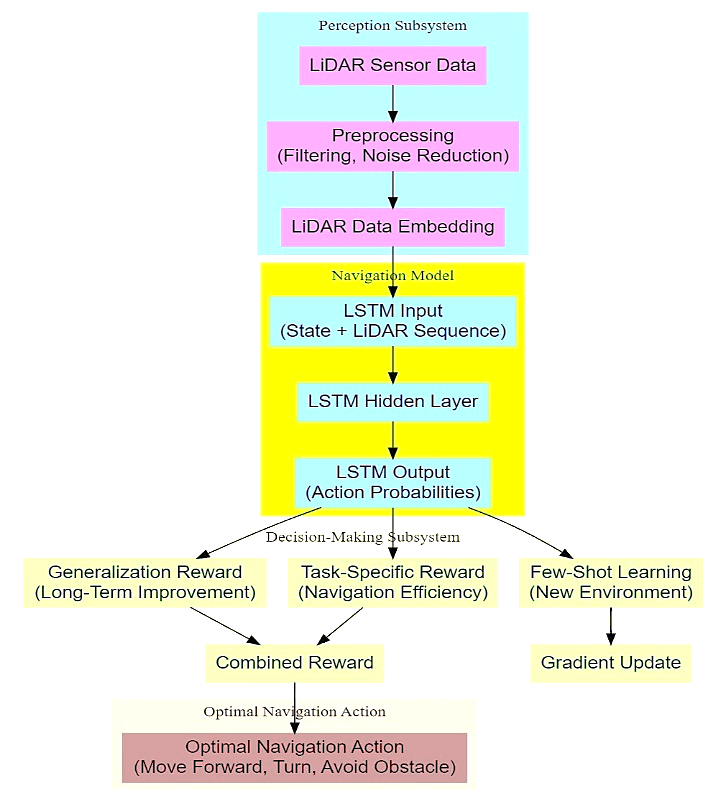
Autonomous robotic systems must efficiently adapt to dynamic environments and generalize across tasks to be effective in real-world applications. However, traditional reinforcement learning (RL) models face significant challenges, including the need for extensive retraining, reliance on large task-specific datasets, and slow adaptation times. To address these issues, this paper proposes a novel meta-learning-based framework that leverages Long Short-Term Memory (LSTM) networks and LiDAR sensor data to enable robots to generalize across tasks and quickly adapt to new environments with minimal retraining. Despite challenges such as handling high-dimensional sensory inputs like LiDAR and the computational complexity of LSTM networks, the framework integrates few-shot learning to overcome data limitations and employs a dual reward function to balance task-specific performance with long-term generalization. The proposed system achieves a task success rate of 93.2%, significantly outperforming traditional RL models (85.7%) and static task-specific models (78.4%). Additionally, it demonstrates superior path efficiency, with an average of 85.2%, compared to 78.9% for RL models. The system adapts to new tasks in an average of 9.5 seconds, far faster than RL approaches, which require 23.7 seconds on average. Moreover, the meta-learning model requires smaller parameter updates (Δθ = 0.012) than traditional RL (Δθ = 0.021), indicating more efficient learning. Despite the challenges of handling complex sensor data and ensuring scalability, these results demonstrate the potential of meta-learning to significantly improve task generalization, adaptability, and computational efficiency in autonomous robotic systems. Future work will explore solutions to further optimize scalability and enhance the system's robustness in more complex environments.
Article Details

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
IJCERT Policy:
The published work presented in this paper is licensed under the Creative Commons Attribution 4.0 International (CC BY 4.0) license. This means that the content of this paper can be shared, copied, and redistributed in any medium or format, as long as the original author is properly attributed. Additionally, any derivative works based on this paper must also be licensed under the same terms. This licensing agreement allows for broad dissemination and use of the work while maintaining the author's rights and recognition.
By submitting this paper to IJCERT, the author(s) agree to these licensing terms and confirm that the work is original and does not infringe on any third-party copyright or intellectual property rights.




References
] R. S. Sutton and A. G. Barto, Reinforcement Learning: An Introduction. MIT Press, 2018.
] K. Arulkumaran, M. P. Deisenroth, M. Brundage, and A. A. Bharath, "Deep Reinforcement Learning: A Brief Survey," IEEE Signal Processing Magazine, vol. 34, no. 6, pp. 26-38, Nov. 2017.
] T. Haarnoja, A. Zhou, P. Abbeel, and S. Levine, "Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor," in Proceedings of the 35th International Conference on Machine Learning, 2018, pp. 1861-1870.
] J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, "Proximal Policy Optimization Algorithms," Proceedings of the International Conference on Machine Learning (ICML), 2017.
] S. Levine, C. Finn, T. Darrell, and P. Abbeel, "End-to-End Training of Deep Visuomotor Policies," Journal of Machine Learning Research, vol. 17, no. 1, pp. 1334-1373, 2016.
] S. Thrun and L. Pratt, Learning to Learn. Springer, 1998.
] Y. Bengio, A. Courville, and P. Vincent, "Representation Learning: A Review and New Perspectives," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 35, no. 8, pp. 1798-1828, Aug. 2013.
] O. Vinyals, C. Blundell, T. Lillicrap, K. Kavukcuoglu, and D. Wierstra, "Matching Networks for One Shot Learning," in Advances in Neural Information Processing Systems, 2016, pp. 3630-3638.
] C. Finn, P. Abbeel, and S. Levine, "Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks," in Proceedings of the 34th International Conference on Machine Learning, 2017, pp. 1126-1135.
] S. Ravi and H. Larochelle, "Optimization as a Model for Few-Shot Learning," in Proceedings of the International Conference on Learning Representations (ICLR), 2017.
] H. Snell, J. Swersky, and R. Zemel, "Prototypical Networks for Few-Shot Learning," in Advances in Neural Information Processing Systems, 2017, pp. 4077-4087.
] A. Gupta, C. Eppner, S. Levine, and P. Abbeel, "Learning Dexterous Manipulation for a Soft Robotic Hand from Human Demonstrations," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 3786-3793.
] D. Zhou, Z. Lin, D. Shen, and Y. Sun, "Fast Adaptation for Legged Robots Using Meta-Learning," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 402-409.
] M. Andrychowicz, M. Denil, S. Gomez, M. W. Hoffman, D. Pfau, T. Schaul, B. Shillingford, and N. de Freitas, "Learning to Learn by Gradient Descent by Gradient Descent," in Advances in Neural Information Processing Systems, 2016, pp. 3981-3989.
] P. Biber and W. Strasser, "The Normal Distributions Transform: A New Approach to Laser Scan Matching," in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003, pp. 2743-2748.
] C. Cadena, L. Carlone, H. Carrillo, Y. Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard, "Past, Present, and Future of Simultaneous Localization and Mapping: Towards the Robust-Perception Age," IEEE Transactions on Robotics, vol. 32, no. 6, pp. 1309-1332, Dec. 2016.
] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. MIT Press, 2005.
] J. K. Gupta, M. Egorov, and M. Kochenderfer, "Cooperative Multi-Agent Control Using Deep Reinforcement Learning," in Proceedings of the International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2017, pp. 66-83.
] A. Kendall, M. Grimes, and R. Cipolla, "PoseNet: A Convolutional Network for Real-Time 6-DOF Camera Relocalization," in Proceedings of the IEEE International Conference on Computer Vision (ICCV), 2015, pp. 2938-2946.
] C. Finn, T. Yu, T. Zhang, P. Abbeel, and S. Levine, "One-Shot Visual Imitation Learning via Meta-Learning," in Proceedings of the Conference on Robot Learning (CoRL), 2017, pp. 357-368.
] S. Levine, P. Pastor, A. Krizhevsky, and D. Quillen, "Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection," International Journal of Robotics Research, vol. 37, no. 4-5, pp. 421-436, 2018.
] C. Wang, R. Torre, P. Sapienza, and C. F. Lee, "LiDAR-SLAM: Real-Time Adaptive Monocular and LiDAR SLAM for Autonomous Vehicles," IEEE Transactions on Intelligent Vehicles, vol. 6, no. 3, pp. 421-432, Sept. 2021.
] M. Andrychowicz, S. Schaal, and J. Achiam, "Learning to Adapt in Dynamic, Non-Stationary Environments," Proceedings of the International Conference on Learning Representations (ICLR), 2020.